Unmanned Systems
DCS has significant unmanned, robotic, and autonomous systems research, development, test, and evaluation experience across the Army, Navy, and Air Force. More than 200 of our personnel actively support programs requiring Software In the Loop (SIL), rapid prototyping, Hardware In The Loop (HIL), systems integration and architecture, and ground/airborne testing including datalinks and complete suites of ISR sensors.
- Unmanned Aerial Vehicles/Systems
- Manned – Unmanned Teaming
- Unmanned Ground Vehicles (UGVs)
- UAV/UGV Integration

DCS performs control station research and development of architecture, tools, and autonomy initiatives to enhance operator performance and enable one human operator to control multiple Unmanned Aerial Vehicles (UAVs). We plan and lead flight test programs involving unmanned and manned aircraft to evaluate system development concepts. For example, DCS served as the overall Air Force Sentinel Hawk test lead and was responsible for software in the loop, hardware in the loop, ground, and airborne testing of the system including its datalinks. For the Navy, we support the MQ-25 (unmanned aerial refueling) program and MQ-4C Triton (reconnaissance) Unmanned Aerial Systems (UASs) among others through the common control system IPT.
 DCS subsidiary, IST, conducts research into the employment of manned – unmanned teams of airborne weapon systems for both the Air Force and Army customers. We developed tools to rapidly prototype innovative operator interfaces and evaluate their effectiveness with trained operators. We created control stations that allow a single operator to effectively control multiple heterogeneous unmanned vehicles. IST researchers develop applications using cooperative control strategies for UASs and develops/evaluates optimal human-machine interfaces.
DCS subsidiary, IST, conducts research into the employment of manned – unmanned teams of airborne weapon systems for both the Air Force and Army customers. We developed tools to rapidly prototype innovative operator interfaces and evaluate their effectiveness with trained operators. We created control stations that allow a single operator to effectively control multiple heterogeneous unmanned vehicles. IST researchers develop applications using cooperative control strategies for UASs and develops/evaluates optimal human-machine interfaces.
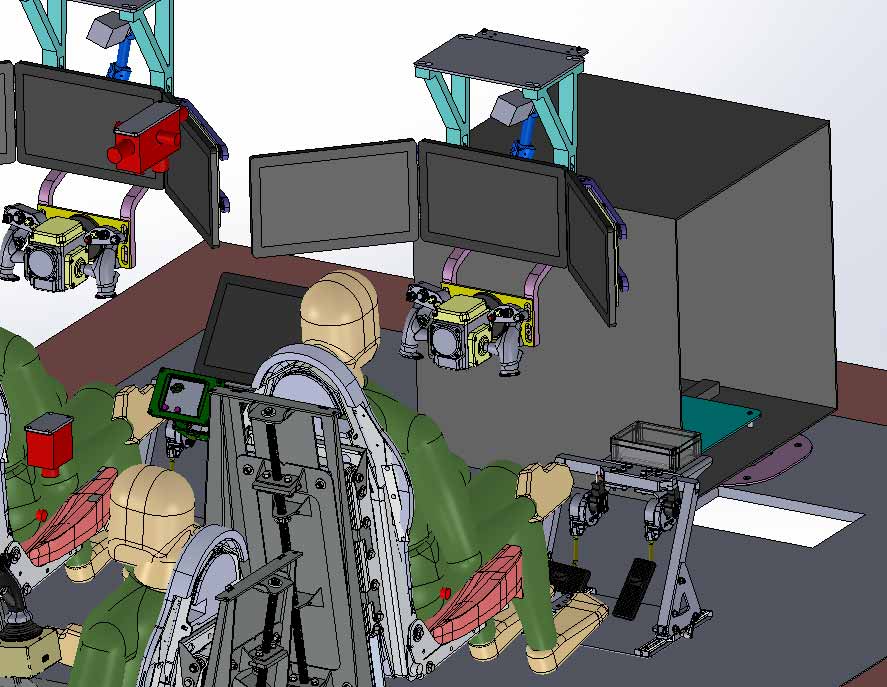
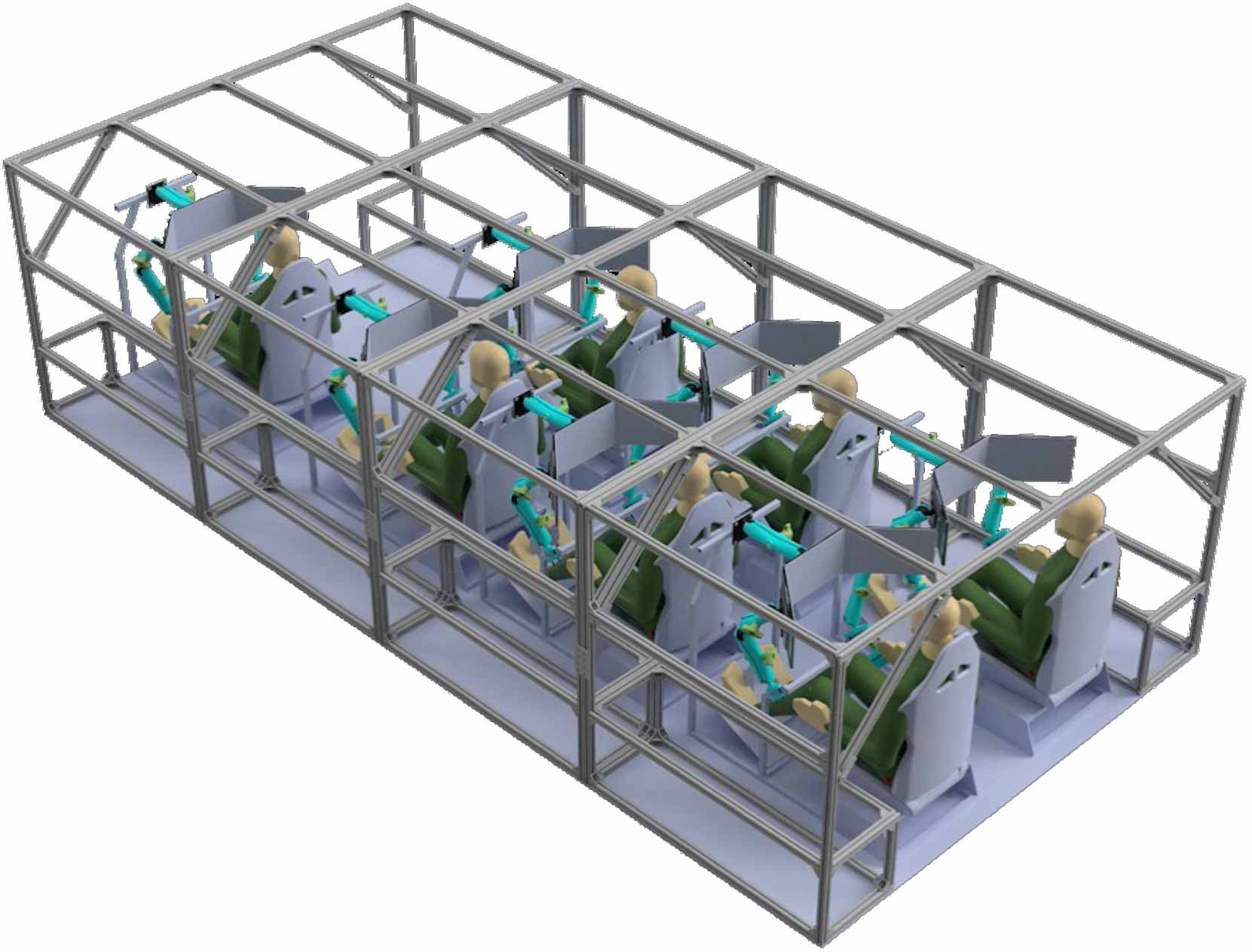
DCS is also an integral part of US Army’s Manned-Unmanned Teaming research related to the Next Generation Combat Vehicle. DCS has been key part of research team of CCDC ARL’s Human Autonomy Teaming research initiative, as well as CCDC GVSC’s Crew Optimization and Automation Technologies program. DCS roles in these has involved development of the human in the loop and software in the loop experiment capabilities at both ARL, to enable investigation of multiple-crew manned, and multiple unmanned vehicle operations. DCS has also been integral to the human subject experiment design and data analysis. Additionally, DCS develops and integrates manned and unmanned vehicle control interfaces for the experimental prototypes of Manned Fighting Vehicle and the Robotic Combat Vehicle.
 We support prototyping of ground vehicle robotics and autonomy for both large and small UGVs. We have supported projects like robotic wingman, which uses autonomous vehicles paired with a manned-vehicle. The UGV is equipped with a vast array of sensors to scout in advance of the manned vehicle and when necessary provide remote gunnery options to help protect troops. Similarly, we have developed other UGV capabilities to provide autonomous convoy and resupply capability demonstrations to minimize or remove humans from situations where Improvised Explosive Devices (IEDs) are a threat.
We support prototyping of ground vehicle robotics and autonomy for both large and small UGVs. We have supported projects like robotic wingman, which uses autonomous vehicles paired with a manned-vehicle. The UGV is equipped with a vast array of sensors to scout in advance of the manned vehicle and when necessary provide remote gunnery options to help protect troops. Similarly, we have developed other UGV capabilities to provide autonomous convoy and resupply capability demonstrations to minimize or remove humans from situations where Improvised Explosive Devices (IEDs) are a threat.

DCS has expertise in integration of UAVs and UGVs into cooperative roles. DCS supports the Army Robotic Vehicle Control Architecture activities where we developed real-time simulations of Class 1 UAV and a Small Unmanned Ground Vehicle (SUGV). The UAV dynamics model and SUGV simulation were integrated into the embedded simulation system to support various simulation activities of the Brigade Combat Team Modernization’s Common Controller program. We document the software, hardware, and integration of four Robotic Enhancement Program (REP) systems. We procured the radios, control systems, UAVs, and small robots (small UGVs) for demonstration under REP, and tested cooperation and control of the combined systems in various locations and terrains.
Contact Us
6909 Metro Park Drive, Suite 500
Alexandria VA 22310
P: 571-227-6000
info@dcscorp.com

Join Our Team
DCS has amazing, talented, and
technology-savvy people. We're growing
continuously and sustainably.
Check out our DCS Careers
© 2025 DCS Corporation, All Rights Reserved
Site Map